Chemtrails or Contrails? By Tim Ball
I won’t apologize for a long and somewhat technical article because understanding requires more than the sensationalist sound bites of media. Indeed, they deliberately cause most of the confusion and distortion.
Michael Crichton addressed the challenge of determining the truth in a 2003 speech.
I have been asked to talk about what I consider the most important challenge facing mankind, and I have a fundamental answer. The greatest challenge facing mankind is the challenge of distinguishing reality from fantasy, truth from propaganda. Perceiving the truth has always been a challenge to mankind, but in the information age (or as I think of it, the disinformation age) it takes on a special urgency and importance.
What is going on in the sky? What is going on with the weather? The answer is simple, nothing unusual or abnormal. The problem is most people have no idea what is normal, and there are a few expert in exploiting that lack of knowledge. Consider the following picture and the question asked.

Are the white streaks across the sky natural cloud formations or creations of government aircraft spraying chemicals into the air to create what some claim are chemtrails? The answer is these are natural formations called cirrus clouds, the Latin word for a horse’s tail.
Most people don’t think of environmental issues as conspiracies because they are led to believe the evidence supports their existence. It doesn’t. In fact, none exists for every major environmental threat of the last 50 years. They are all exploitations of natural events and trends to advance the political agenda that humans are destroying the planet, and only a one-world government can save it. Environmentalists claim a threat exists and politicians are eager to participate because, as H L Mencken said years ago,
The whole aim of practical politics is to keep the populace alarmed (and hence clamorous to be led to safety) by menacing it with an endless series of hobgoblins, all of them imaginary.
Also, the politicians, like most people, don’t know what is natural or normal. They don’t understand and are afraid to show their ignorance by asking questions. Most important they are desperate to appear ‘green’.
Conspiracy theories take three forms in today’s world. There are actual conspiracies. Then there are those charged with being consipiracy theorists because they dare to question government actions and behaviour. Finally, there are people who see conspiracy in an endless variety of instances for an endless variety of reasons. Conspiracies always existed, but they took on a new life, form, and intensity with the Internet.
One thing exploited as a threat to people are clouds that some claim are created by government spraying chemicals into the sky. One sign of a false threat is a unique term or phrase created for the condition, in this case, it was Chemtrails.
Seeing images in cloud formations is a favourite game for children of all ages. Search the internet for a dazzling array of bizarre clouds. It is hard to believe such formations are natural. This means it is easy to find and fool people with ‘different’cloud formations.
Contrails are long thin ribbons of cloud created as water vapour exhaust from aircraft engines, condenses to water droplets and become visible. Geoengineering is the deliberate action of changing or modifying the environment or climate.

Mammatus Clouds

Lenticular Hat Cloud
The lenticular cloud type frequently appears along the foothills of the Rocky Mountains and are the major source of reports of UFOs, especially when the setting sun makes them glow red, as illustrated.
Most people are unaware until it is pointed out to them, of the paradox that exists as we struggle to understand the extent of the role of government. One minute people say government does too much and costs too much, the next they demand government action to resolve a problem. Environmentalists demand the government stop global warming but oppose experimental remedial actions like spreading iron filings on the oceans to increase uptake of CO2. The actions to cause deliberate change or remediate a perceived human error are collectively called geo-engineering. Regardless of the cause or the purpose they are unjustified because people, and especially the government, don’t know what is happening or how the environment works.
Doing nothing is the only course of action if you don’t know or understand. Those who want total government control, including environmentalists, don’t agree. They resort to the precautionary principle. This is the argument that it is better to act “just in case”. The problem is society cannot afford to deal with every speculated threat. Leaders are required to determine the extent of the threat and set priorities. Exploiters know most politicians are not able to set priorities.
When I appeared before the Canadian Parliamentary Committee on the ozone issue years ago, I realized the dilemma. Ozone was not a problem nor was it endangered, this was just another imaginary threat skillfully exploited for a political agenda. I abandoned my prepared presentation and used facts to outline an impending threat.
- The Earth is slowing in its rate of rotation.
- The Earth’s magnetic field has weakened for the last 1000 years.
- If this continues, the magnetic field will disappear in some 120 years.
- The Earth’s magnetic field reverses itself frequently throughout geologic time.
- When reversals occur there appear to be an extensive extinction of species.
My question to the Committee was what did my government intend to do. One response illustrated the problem. The Liberal MP Maureen Catterall said Galileo would be ashamed of me. I thanked her for the compliment of just being mentioned in the same sentence as Galileo. However, her comment showed how little she understood his role in the history of science. Another negative response came from NDP MP Jim Fulton, who went on to become chair of the David Suzuki Foundation.
Recently, Bill McKibben, another ill-informed radical environmentalist said we must declare war on climate change. Environmental issues are a war and as Aeschylus said: “In war, truth is the first casualty”. The conspiracy theorists exploit people’s lack of knowledge of clouds and cloud formation. Sadly, most of them don’t know what they are talking about but select information through the tunnel vision of their political ideology that includes hostility to progress and development.
The Chemtrail Conspiracy in Scientific Context
I am not going to examine all the claims and evidence presented by chemtrail conspiracy theorists. It includes a variety of internal and external photographs of aircraft all purportedly showing spraying equipment and modifications for spraying. There are a few scientifically and mechanically based web pages that completely dismantle the claims and show the extent to which conspiracy theorists will go. The biggest mistake is not knowing the difference between natural cloud formations and condensation trails from aircraft. Also, it is easy to find aircraft equipped for spraying because they are used for firefighting and crop spraying.
The following is a brief synopsis of the cirrus and noctilucent clouds that are mistaken for chemtrails. It explains how and where they are formed Figure 1 shows the different atmospheric layers each defined by temperature changes that reflect different chemistry.
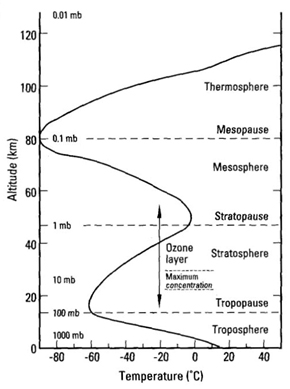
Figure 1: General Layers of the Atmosphere
The critical boundary is the Tropopause between the Troposphere, where 99% of the weather occurs, and the Stratosphere. It’s a very distinct boundary marking different densities of gas and a change in temperature. In the Troposphere it decreases with altitude. In the Stratosphere, where the few gases are thinly spread, it increases.
Figure 1 shows the Tropopause as a single line at 17 km. Figure 2 shows the complexity in a cross-section from the Equator to the Poles (both Hemispheres are essentially the same general pattern). You can see that the height of the Tropopause is double at the Equator compared to the Poles. The temperature difference is the main cause but rotation of the Earth (centrifugal force) is an additional factor. In addition, the height varies seasonally. Variation at the Equator is 17 km (winter) to 19 km (summer). At the Poles, it is 7km in winter to 10 km in summer. Greater range at the Poles is because of the greater seasonal temperature range.
Understanding of some Troposphere dynamics is very recent. Figure 2 appeared in 1997. Before that, the troposphere was shown with three distinct cells and a continuous Tropopause. It is not continuous, with Jet Stream winds at the two breaks as shown. The clouds mistaken for chemtrails occur on each side of the Tropopause at the top of the Troposphere or in the lowest portion of the Stratosphere. The important point is the winds are very strong, while temperatures and humidity are very low.
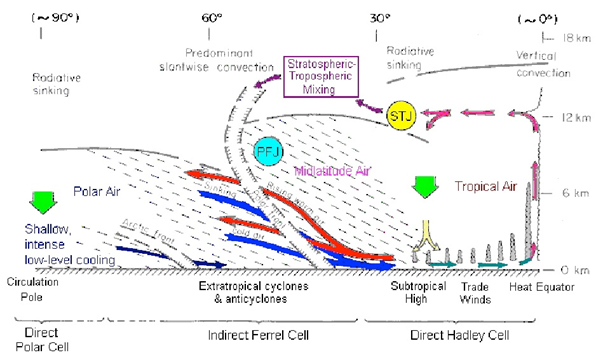
Figure 2 Tropopause Cross-section.
PFJ =Polar Front Jet; STJ = SubTropical Jet
The Cloud Classification System names clouds by their form and altitude. There are two forms; layer clouds called stratus, with a horizontal form, and heap or vertical development clouds called cumulus.
They are then defined by altitude. The following table is from the United Kingdom Meteorological Office (UKMO).
Cloud level (ft)
High clouds (CH)
Base usually 20,000 ft or above, over British Isles
Medium clouds (CM)
Base usually between 6,500 and 20,000 ft over British Isles.
Low clouds (CL)
Base usually below 6,500 ft over British Isles.In this article, we are only interested in the layered High clouds (CH) called Cirrus.
Cloud type
• Cirrus
• Cirrocumulus
• Cirrostratus
• Altocumulus
• Altostratus
• Nimbostratus
• Stratocumulus
• Stratus
• Cumulus
• Cumulonimbus
Condensation Trails (Contrails)
A Contrail is exhaust from an aircraft engine cooling very rapidly below the dew point temperature and condensing into a visible trail of microscopic water droplets. These are the same droplets that make up a cloud. They are so small it takes approximately one million to form a raindrop. There are so many droplets in a cloud that it becomes visible.
Through binoculars, you can see the gap between the jet engine and the beginning of the trail.

Earlier I mentioned that the gas constituency of the lower Stratosphere, where these planes fly is different, being much thinner and colder than in the upper Troposphere. With better pressurization and more efficient engines, modern jets operate most efficiently in the colder temperatures at high altitudes. There are also thousands of more flights every day. The biggest increase in air traffic is between Asia and North America using “great circle” routes that take them over western North America and Alaska or the Pole. This is where most reports of chemtrails occur. Figure 3 shows the routes for Delta Airlines and illustrates the locations affected.

Figure 3
Great circle routes take Asian bound aircraft across the general westerly flow of the upper-level winds (Figure 4).
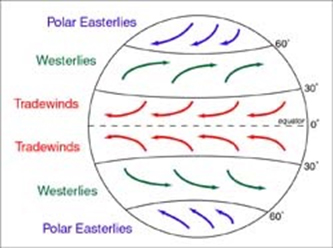
Figure 4
This means condensation trails and high-level clouds, especially Cirrus in the lower stratosphere are dispersed to the east across Alaska, the west coast, and the Rocky Mountains. Temperatures at these altitudes mean most of the gases condense directly to ice crystals. This makes them very visible and slow to dissipate.
Compare the cirrus clouds Figure 5 with contrail images in Figures 6.

Figure 5

Figure 6
Chemtrail conspiracy theorists claim breaks in contrails are proof of spraying. The problem is contrails form under certain conditions, and they can change even in short sections of the sky.
Gases in the Stratosphere are very low density, so aircraft exhaust is a much higher percentage than when injected into the troposphere. This creates very different contrails, rates of dissipation and other factors. I mentioned that there are clouds in the lower Stratosphere called Noctilucent clouds (Figures 7 and 8). Noctilucent is Latin for night light because these clouds are most visible at twilight.

Figure 7

Figure 8
Figure 9 shows noctilucent and cirrus clouds in the same image.
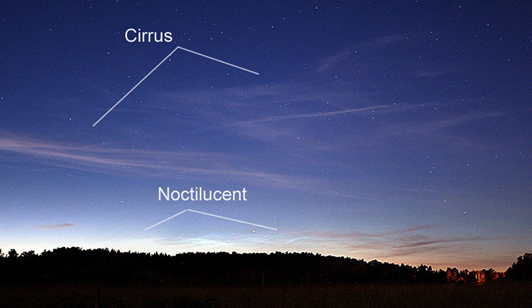
Figure 9
Many confuse cirrus and noctilucent clouds with chemtrails and contrails. Many confuse lower stratosphere contrails with chemtrails. It’s driven by the desire to see chemtrails. I’ve received many photos as evidence of chemtrails that are contrails, high cirrus or noctilucent events.
Noctilucent cloud occurrences are reportedly increasing. It is probably because noctilucent clouds “ …are most commonly observed in the summer months at latitudes between 50° and 70° north and south of the equator”. These are the latitudes at which most commercial flight increases have occurred.
There may be issues with flights in the stratosphere but nobody is really looking. If there is a problem, the obvious solution is politically unattractive; fly lower. However, fuel consumption increases significantly at lower altitudes and that is economically and politically unattractive.
We are in an age of environmental hysteria and conspiracy theories. We need answers from science free from politics. People and politicians need to sort out what actions and issues governments should be taking, but we can only do that if we understand the issues. Since we don’t, it is better to do nothing. We must avoid the irresponsibility of the precautionary principle. We must resist, and help our leaders resist, Eco-Bullying.